Computer Aided Control Engineering
Bachelor Maschinenbau
Die Lehrveranstaltung behandelt in Rechnerübungen die Grundlagen der Regelungstechnik mit folgenden inhaltlichen Schwerpunkten:
- Dynamische Systeme im Zeit- und Bildbereich
- Beschreibung von Regelkreisen, Übertragungsglieder und Blockschaltbilder
- Regelkreisanalyse im Zeit- und Frequenzbereich
- Reglerentwurf, Regelkreisstabilität und Frequenzkennlinienverfahren
- Kaskadenregelung
- Rapid Control Prototyping
Weitere Informationen für Studierende
Virtual Automation

Bachelor Maschinenbau
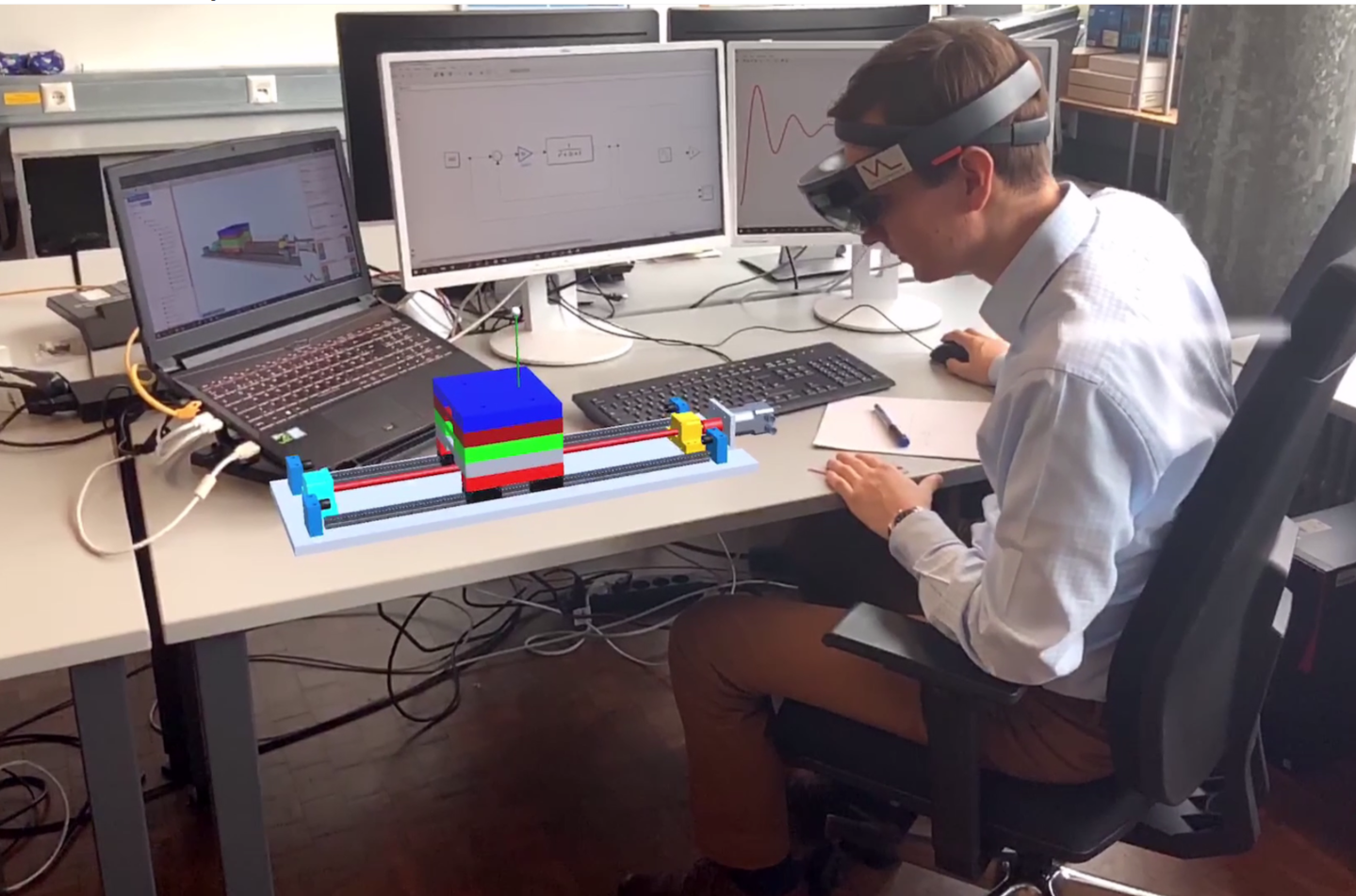
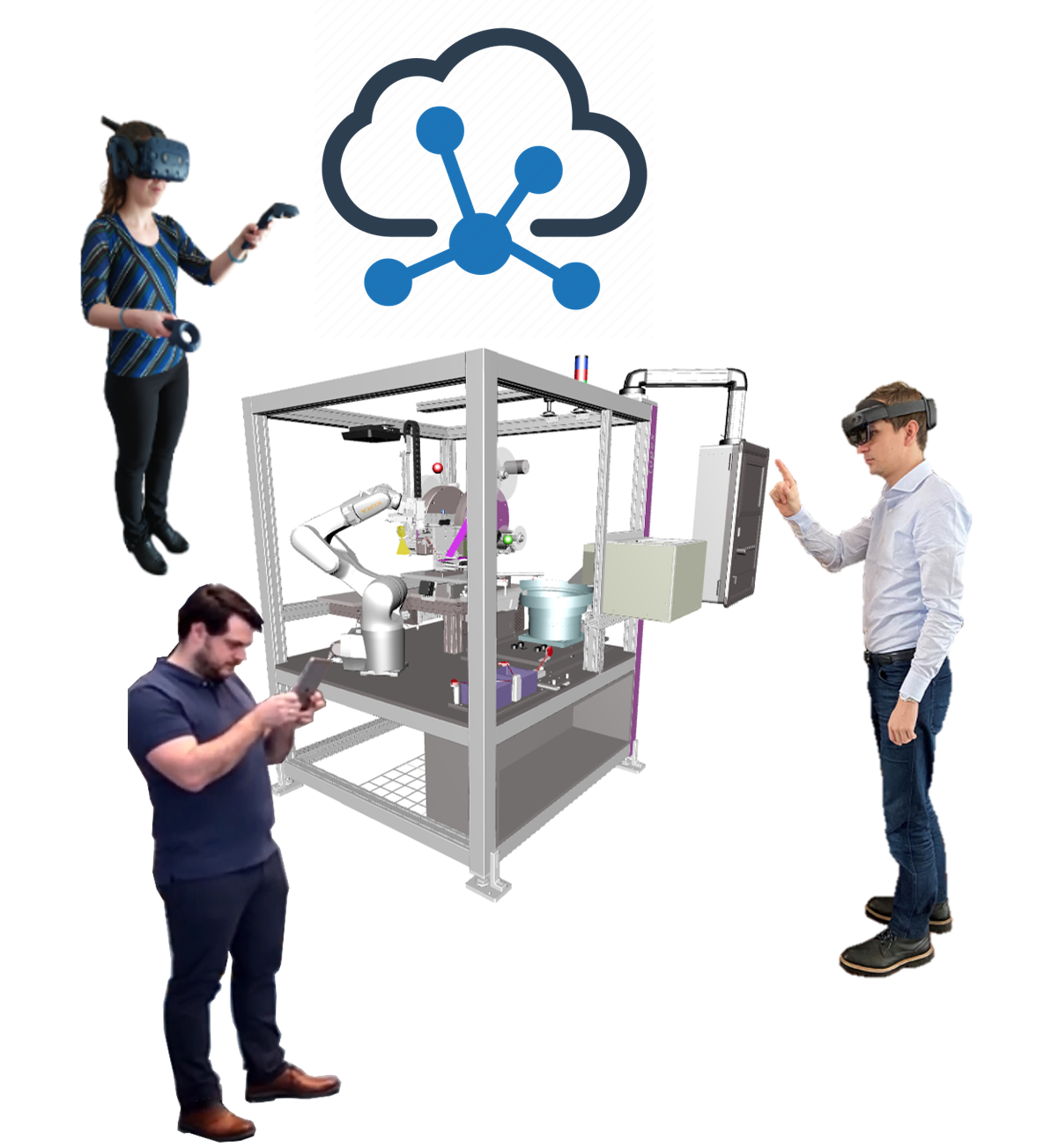
Die Lehrveranstaltung Virtual Automation ist Bestandteil des Studienschwerpunkts Smart Automation. Es werden Inhalte zur Digitalisierung und Simulation von Maschinen und Anlagen im Kontext Industrie 4.0 behandelt:
- X-in-the-Loop-Simulationsmethoden
- Echtzeitsimulation
- Realdaten- und Steuerungskopplung, Zeitsynchronisation
- Modellierungsmethoden
- Numerische Aspekte unter Echtzeit und Echtzeitmodelle
- Digital Twin as a Service und Mixed-Reality-in-the-Loop Simulation
- Laborübungen
Weitere Informationen für Studierende:
Softwaretechnologien in der Automation
Bachelor Maschinenbau
Die Lehrveranstaltung Softwaretechnologien in der Automation ist Bestandteil des Studienschwerpunkts Smart Automation. Es werden Inhalte zu modernen Informationstechnologien im Kontext Industrie 4.0 behandelt:
- Prinzipien der Softwaretechnik
- Grundlagen von Rechnernetzwerken
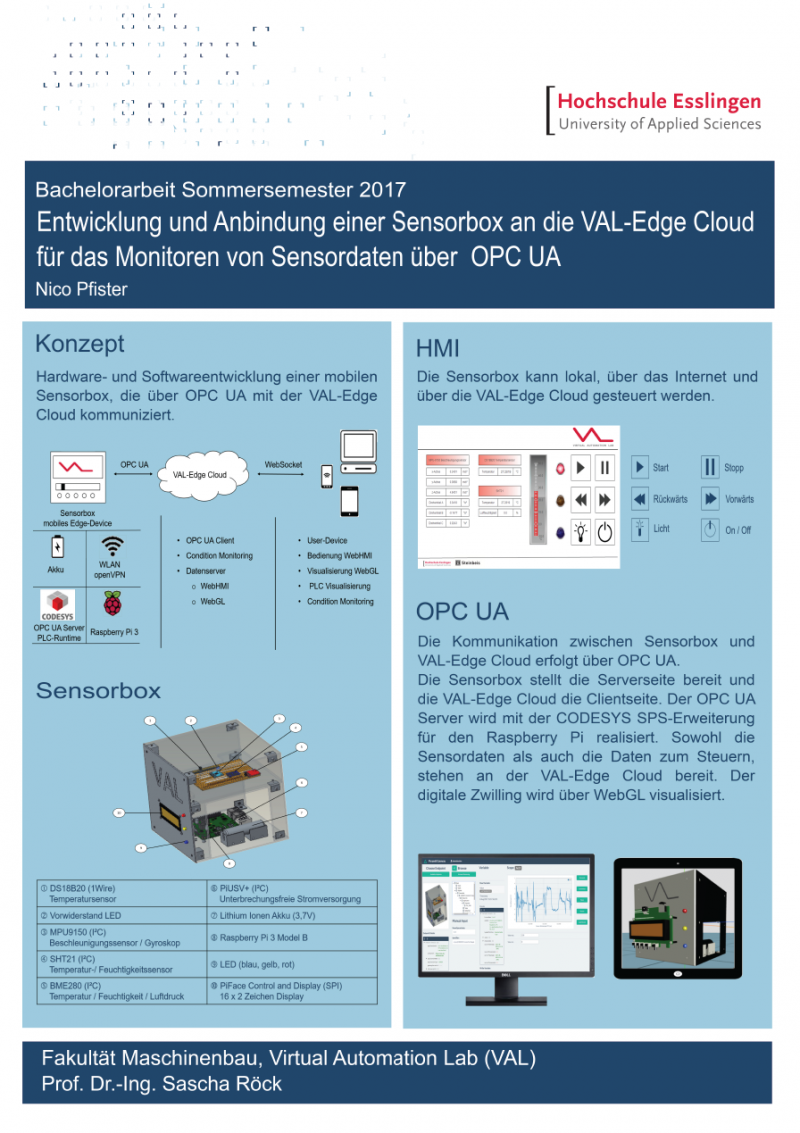
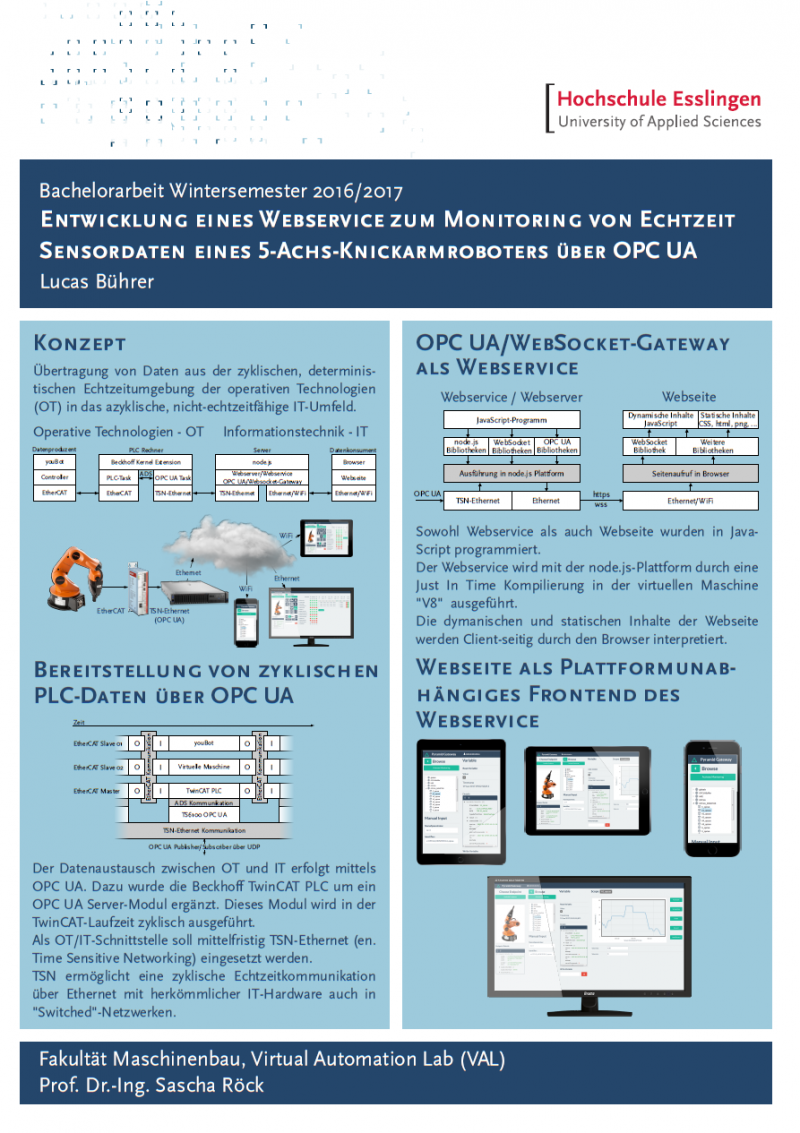
- Plattformunabhängige Kommunikationssysteme (z.B. OPC UA)
- Server-Client Architektur von Web-Anwendungen
- Browser-Applikationen (Frontend), Webserver und Microservices (Backend)
- Kommunikationskonzepte der Web- und Cloudtechnologien
- Grundlagen der Datenbanksysteme
- Laborübungen
Weitere Informationen für Studierende:
Regelsysteme im Zustandsraum

Master Ressourceneffizienz im Maschinenbau
Die Lehrveranstaltung Regelsysteme im Zustandsraum baut auf den Regelungstechnik Grundlagen auf und behandelt die Regelung von Mehrgrößensystemen:
- Beschreibung dynamischer Systeme im Zustandsraum
- Zustandsrückführung und Führungsgrößenaufschaltung
- Entwurfsmethoden für Zustandsregler wie Polvorgabe und Optimale Regelung (LQ-Regler)
- Zustandsregelung mit Integral-Regler
- Zustands-Beobachter
Weitere Informationen für Studierende:
Methoden der Industrierobotik

Master Ressourceneffizienz im Maschinenbau
In der Lehrveranstaltung im Anwendungsmodul Robotersysteme werden Methoden der Industrierobotik betrachtet. Dabei werden folgende Themen behandelt:
- Kinematik und Dynamik
- Regelungsmethoden in der Robotik
- Steuerungsmethoden und Bewegungsprofile
- Virtuelle Inbetriebnahme
In der begleitenden Laborübung wenden die Studierenden die Methoden an praktischen Beispielen an.
Der Link zum Moodle-Kurs folgt.
Methoden der autonomen Robotik
Master Ressourceneffizienz im Maschinenbau
In der Lehrveranstaltung im Anwendungsmodul Robotersysteme werden moderne Methoden der autonomen Robotik in einer Smart Factory an Beispielen aus der autonomen Indoor-Flugrobotik betrachtet. Dabei werden folgende Themen im Kontext der autonomen Robotik behandelt:
- Trajektorienplanung, Steuerung und Regelung
- Lokalisierungs- und Navigationsmethoden
- Software- und IT-Frameworks
In der begleitenden Laborübung wenden die Studierenden die Methoden an praktischen Beispielen realer Indoor-Flugrobotik-Anwendungen an.
Der Link zum Moodle-Kurs folgt.